-
 全国咨询热线: 13122402111
全国咨询热线: 13122402111 -
-
 专业的技术
专业的技术 -
 实惠的价格
实惠的价格 -
 优质的后期
优质的后期 -
 重信守誉
重信守誉
-
 全国咨询热线: 13122402111 专业的技术 实惠的价格 优质的后期 重信守誉
全国咨询热线: 13122402111 专业的技术 实惠的价格 优质的后期 重信守誉 作者:Atlas | 来源:3D视觉工坊
 图1 常见工业相机外观一问价格,至少都是大几千,贵的在十几万,心里就不禁有疑问,就这么一个破相机,为啥就卖这么贵?它跟我们常见的单反相机有什么区别?我用单反相机来拍,色彩又好,成像又清晰,它不香吗?为啥一定要用工业相机?
图1 常见工业相机外观一问价格,至少都是大几千,贵的在十几万,心里就不禁有疑问,就这么一个破相机,为啥就卖这么贵?它跟我们常见的单反相机有什么区别?我用单反相机来拍,色彩又好,成像又清晰,它不香吗?为啥一定要用工业相机? 图2 常见单反相机外观咋一看,单反相机块头这么大、工业相机块头这么小,工业相机明显在坑人啊!诚然,由于工业相机需求量和产量的缘故,工业相机的研发、制造总成本会远远高过消费级单反相机,这也是它价格更为昂贵的原因,但我们这里一定要明白一个概念:工业相机,不能简单地理解为工业上用的相机,它是有特殊用途的一类相机统称。特殊用途:什么叫特殊用途,比如说我们3D重建算法,对相机的畸变要求尽量小,在某些恶劣场合,需要用到IP67级防水相机、拍摄原子弹爆炸前几微秒内原子弹内部的场景,这类专门的相机可以称为高速相机,这些相机都可以称为工业相机。而相反的,你认为工厂里监控摄像头,尽管它部署在工厂里的每个角落,但你能认为它是工业相机吗?
图2 常见单反相机外观咋一看,单反相机块头这么大、工业相机块头这么小,工业相机明显在坑人啊!诚然,由于工业相机需求量和产量的缘故,工业相机的研发、制造总成本会远远高过消费级单反相机,这也是它价格更为昂贵的原因,但我们这里一定要明白一个概念:工业相机,不能简单地理解为工业上用的相机,它是有特殊用途的一类相机统称。特殊用途:什么叫特殊用途,比如说我们3D重建算法,对相机的畸变要求尽量小,在某些恶劣场合,需要用到IP67级防水相机、拍摄原子弹爆炸前几微秒内原子弹内部的场景,这类专门的相机可以称为高速相机,这些相机都可以称为工业相机。而相反的,你认为工厂里监控摄像头,尽管它部署在工厂里的每个角落,但你能认为它是工业相机吗?
 图3 FlyCapture SDK 采集图像界面成像精准:一般来说,工业相机的图像传感器是逐行扫描的,而普通传感器是隔行扫描的,前者生产工艺更为复杂,成品率低、出货量少,世界上只有少数公司能够提供这类产品。此外,工业相机的畸变、色彩还原准确度往往更好,而单反相机追求的是要拍的好看。稳定性和可靠性:工业相机的性能稳定可靠、易于安装,结构紧凑结实不易损坏,连续工作时间长,可在较差的环境下工作,这是单反相机做不到的。例如一些工业相机被安装在工业检测生产线上,负责产品的视觉测量、缺陷筛查等工作,这就要求相机在流水线常年连续运转过程中保证不出故障,否则会导致生产线停摆甚至瘫痪,这对企业来说意味着难以挽回的经济损失。 特殊用途严苛场景:比如某些在航空上用的相机,其工作温度范围就要求:-40℃~85℃;成像速度:拍摄汽车碰撞、原子弹爆炸的高速相机;光谱范围:比如测量钢炉内铁水温度的红外相机;除此之外,工业相机一般来是黑白的,主要是为了保证曝光充足、成像准确。至于价格,我认为不是区分工业相机和单反相机主要的因素,还是得看具体相机的型号,消费级市场也有大十几万的设备。
图3 FlyCapture SDK 采集图像界面成像精准:一般来说,工业相机的图像传感器是逐行扫描的,而普通传感器是隔行扫描的,前者生产工艺更为复杂,成品率低、出货量少,世界上只有少数公司能够提供这类产品。此外,工业相机的畸变、色彩还原准确度往往更好,而单反相机追求的是要拍的好看。稳定性和可靠性:工业相机的性能稳定可靠、易于安装,结构紧凑结实不易损坏,连续工作时间长,可在较差的环境下工作,这是单反相机做不到的。例如一些工业相机被安装在工业检测生产线上,负责产品的视觉测量、缺陷筛查等工作,这就要求相机在流水线常年连续运转过程中保证不出故障,否则会导致生产线停摆甚至瘫痪,这对企业来说意味着难以挽回的经济损失。 特殊用途严苛场景:比如某些在航空上用的相机,其工作温度范围就要求:-40℃~85℃;成像速度:拍摄汽车碰撞、原子弹爆炸的高速相机;光谱范围:比如测量钢炉内铁水温度的红外相机;除此之外,工业相机一般来是黑白的,主要是为了保证曝光充足、成像准确。至于价格,我认为不是区分工业相机和单反相机主要的因素,还是得看具体相机的型号,消费级市场也有大十几万的设备。
 图4 工业相机的接口[2]镜头接口:固定相机跟镜头,也称为卡口;数据接口(控制):传输拍摄到的相机数据(控制相机);电源接口(控制):提供相机电源(控制相机);有时候,数据口和电源口也会放一起,某个接口既能提供数据传输又能提供相机电源,随着时代的变化,这类即插即用的工业相机越来越普遍。这里所谓的即插即用,并不是说插上去就能用,而是在安装相应的驱动后,我们通过SDK可以进行调用,区别与某些接口相机需要自己去写底层驱动以及相应图像处理算法。
图4 工业相机的接口[2]镜头接口:固定相机跟镜头,也称为卡口;数据接口(控制):传输拍摄到的相机数据(控制相机);电源接口(控制):提供相机电源(控制相机);有时候,数据口和电源口也会放一起,某个接口既能提供数据传输又能提供相机电源,随着时代的变化,这类即插即用的工业相机越来越普遍。这里所谓的即插即用,并不是说插上去就能用,而是在安装相应的驱动后,我们通过SDK可以进行调用,区别与某些接口相机需要自己去写底层驱动以及相应图像处理算法。
 图5 不带镜头的工业相机常见的工业相机镜头接口包括:C、CS、M42、M50、F、V、T2等等,接口类型的不同和工业相机镜头性能、质量并无直接关系,仅仅是接口方式不一样,一般来说,我们也能找到各种常用接口之间的转接口。下面简要地介绍下这些接口。最简单的,你记住什么相机接口对什么相机镜头即可。
图5 不带镜头的工业相机常见的工业相机镜头接口包括:C、CS、M42、M50、F、V、T2等等,接口类型的不同和工业相机镜头性能、质量并无直接关系,仅仅是接口方式不一样,一般来说,我们也能找到各种常用接口之间的转接口。下面简要地介绍下这些接口。最简单的,你记住什么相机接口对什么相机镜头即可。
 图6 工业相机C接口和CS接口实物(图中CS接口相机已转接为C接口)[2]法兰距:也叫做像场定位距离,是指机身上镜头卡口平面与机身曝光窗平面之间的距离,即镜头卡口到感光元件(一般是CMOS或CCD)之间的距离。注意,法兰距不同,即便装上也无法清晰对焦和成像。
图6 工业相机C接口和CS接口实物(图中CS接口相机已转接为C接口)[2]法兰距:也叫做像场定位距离,是指机身上镜头卡口平面与机身曝光窗平面之间的距离,即镜头卡口到感光元件(一般是CMOS或CCD)之间的距离。注意,法兰距不同,即便装上也无法清晰对焦和成像。


 (1)M12(2)M42(3)M58 图7 M系列接口 [2]而M42、M58接口更大,往往用在大靶面的工业相机、甚至线扫相机上。这类接口直接通过螺纹连接到相机上,连接较为方便。
(1)M12(2)M42(3)M58 图7 M系列接口 [2]而M42、M58接口更大,往往用在大靶面的工业相机、甚至线扫相机上。这类接口直接通过螺纹连接到相机上,连接较为方便。

 (1)EF接口(佳能)(2)F接口(尼康) 图8 卡扣系列接口[2]
(1)EF接口(佳能)(2)F接口(尼康) 图8 卡扣系列接口[2]
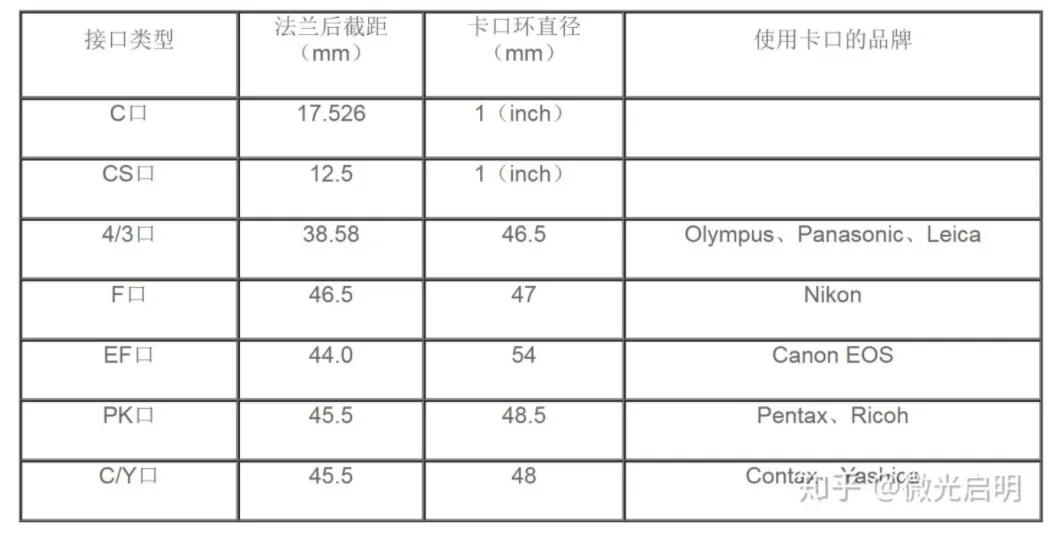
 图9 常见数据+电源 接口[3]它们的性能指标对比如下:
图9 常见数据+电源 接口[3]它们的性能指标对比如下: 表2 常见数据+电源接口对比[3]简要地解释一下:USB2.0、3.0系列:这类接口的好处是即插即用(虽然这里说是即插即用,但一般工业相机都还是要安装驱动以及相应的SDK才能调用的),3.0的速度达到了5.0GB,但问题是传输的线路太短,不太适合长距离、大批量工业相机的应用场景(这在大多数化工企业中是这样,相机安装在工厂的各个角落,处理放在主控室)。IEEE1394:Apple公司推出的标准,传输速度介于USB2.0~3.0之间(还是比较慢的),传输距离达到了100m,但是其需要额外的转接头,因此应用也不多。GIGE:也就是常说的网口相机,传输速度虽然不高(一般来说也够用了),但是传输距离远,集成方便,配合上千兆路由器,可以实现大规模的工业相机集成,目前工业应用上最为广泛,较为高端的工业相机也大多采用这种配置,唯一的缺点是需要额外的电源供电。Cameralink:一种专门的工业级视觉产品使用行业标准,传输速度可以达到5.44Gbit/s,往往用在之前的一些高速相机上(因为之前USB2.0、GIGE这些接口都太慢了),但缺点是需要额外的图像采集卡、价格贵(一条线缆1000)、而且不好用,要自己去写相机驱动,并且不支持热插拔(会损坏相机!)。原因:使用这类接口的相机在物理上被硬生生地拆为两部分,相机的厂商只负责相机的制造,而相应的驱动、软件,比如说图像的采集、处理等算法都需要你自己对CameraLink采集卡进行编程。CiaXPress:速度快、传输距离远,独立供电、价格也便宜,推出来用以取代Cameralink接口。这类相机需要额外的接口卡,注意,这里是接口卡!接口卡不同于采集卡,其只是相机采集到的数据的一个中转站,不会对数据做任何处理,其直接将数据存储在主寄存器中。因为这类相机传输速度较快,如果将拷贝数据的工作交给CPU来做的话,CPU将会消耗大量资源.需要说明的是,我们选取工业相机型号的时候,接口并不是传输速度越好越好,而是要挑合适的,杀鸡焉用牛刀?那怎么选型呢?我们下一节说!
表2 常见数据+电源接口对比[3]简要地解释一下:USB2.0、3.0系列:这类接口的好处是即插即用(虽然这里说是即插即用,但一般工业相机都还是要安装驱动以及相应的SDK才能调用的),3.0的速度达到了5.0GB,但问题是传输的线路太短,不太适合长距离、大批量工业相机的应用场景(这在大多数化工企业中是这样,相机安装在工厂的各个角落,处理放在主控室)。IEEE1394:Apple公司推出的标准,传输速度介于USB2.0~3.0之间(还是比较慢的),传输距离达到了100m,但是其需要额外的转接头,因此应用也不多。GIGE:也就是常说的网口相机,传输速度虽然不高(一般来说也够用了),但是传输距离远,集成方便,配合上千兆路由器,可以实现大规模的工业相机集成,目前工业应用上最为广泛,较为高端的工业相机也大多采用这种配置,唯一的缺点是需要额外的电源供电。Cameralink:一种专门的工业级视觉产品使用行业标准,传输速度可以达到5.44Gbit/s,往往用在之前的一些高速相机上(因为之前USB2.0、GIGE这些接口都太慢了),但缺点是需要额外的图像采集卡、价格贵(一条线缆1000)、而且不好用,要自己去写相机驱动,并且不支持热插拔(会损坏相机!)。原因:使用这类接口的相机在物理上被硬生生地拆为两部分,相机的厂商只负责相机的制造,而相应的驱动、软件,比如说图像的采集、处理等算法都需要你自己对CameraLink采集卡进行编程。CiaXPress:速度快、传输距离远,独立供电、价格也便宜,推出来用以取代Cameralink接口。这类相机需要额外的接口卡,注意,这里是接口卡!接口卡不同于采集卡,其只是相机采集到的数据的一个中转站,不会对数据做任何处理,其直接将数据存储在主寄存器中。因为这类相机传输速度较快,如果将拷贝数据的工作交给CPU来做的话,CPU将会消耗大量资源.需要说明的是,我们选取工业相机型号的时候,接口并不是传输速度越好越好,而是要挑合适的,杀鸡焉用牛刀?那怎么选型呢?我们下一节说!
 图10 单片凸透镜的物理焦距但现代镜头通常由多片薄透镜组成,如图11所示:
图10 单片凸透镜的物理焦距但现代镜头通常由多片薄透镜组成,如图11所示: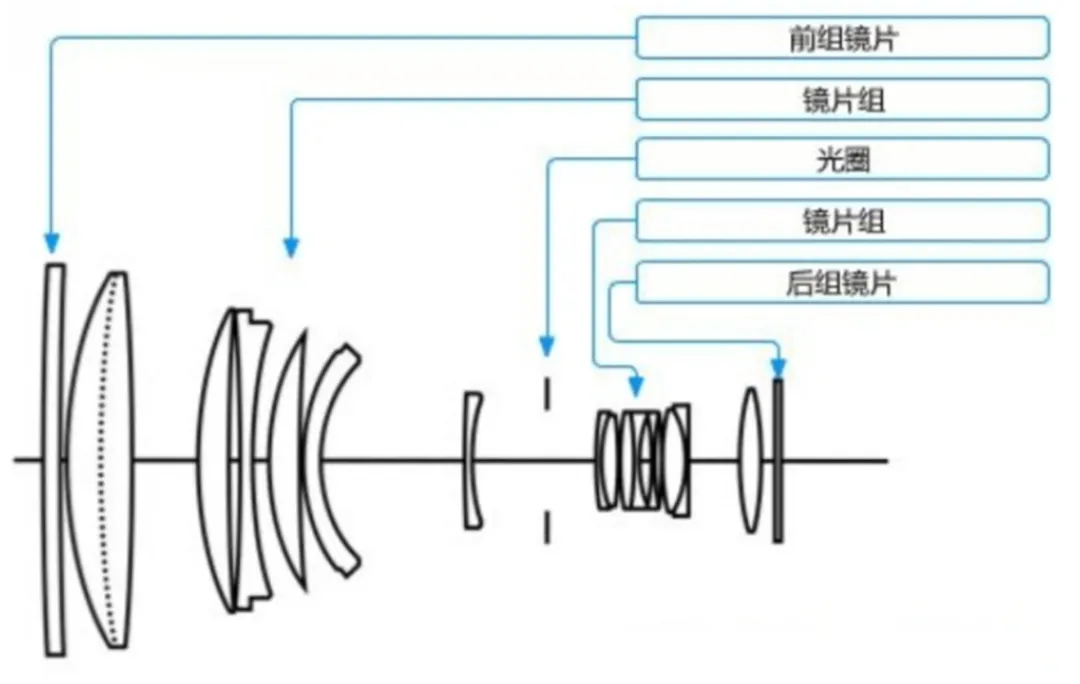 图11 现代相机镜头构成[5]它们之间的的相对距离可以发生变化,因而物理焦距也可以随之发生变化,这类镜头称为变焦镜头,反之不能发生变化的是定焦镜头。
图11 现代相机镜头构成[5]它们之间的的相对距离可以发生变化,因而物理焦距也可以随之发生变化,这类镜头称为变焦镜头,反之不能发生变化的是定焦镜头。
 图12 镜头的摄影焦距[4]
图12 镜头的摄影焦距[4]
 图13 相机清晰成像对焦情况对于小人头部的A点,其从头部发出三个方向的光线,经过镜头汇聚后,汇聚于成像面的A’点。那么对于A点发出其它方向的光线呢?它们也会汇聚于A点,因为镜头的形状是经过专门设计的。这里有两点特殊:同一点发出的各个方向的光线,经过镜头后必定汇聚于同一点;同一平面上的不同点发出的光线,经过镜头后,汇聚于不同点;对于这个模型,这里可以看出,如果相机镜头跟成像面的距离,也就是焦距不对,那么必然要进行调焦。在实际情况中,在大多数相机中,CCD是固定不动的,我们通过移动整个镜头离成像面的距离来完成对焦(镜头的物理焦距依然没有发生改变,这也是定焦镜头可以调焦的原理)。为什么改变物体距相机的距离后,我们要重新进行调焦?原因如下:即使是同一个高度点,在不同距离上,摄影焦距也是不一样的,因而需要调焦,示意图如下,A1、A2的摄影焦距显然不一样:
图13 相机清晰成像对焦情况对于小人头部的A点,其从头部发出三个方向的光线,经过镜头汇聚后,汇聚于成像面的A’点。那么对于A点发出其它方向的光线呢?它们也会汇聚于A点,因为镜头的形状是经过专门设计的。这里有两点特殊:同一点发出的各个方向的光线,经过镜头后必定汇聚于同一点;同一平面上的不同点发出的光线,经过镜头后,汇聚于不同点;对于这个模型,这里可以看出,如果相机镜头跟成像面的距离,也就是焦距不对,那么必然要进行调焦。在实际情况中,在大多数相机中,CCD是固定不动的,我们通过移动整个镜头离成像面的距离来完成对焦(镜头的物理焦距依然没有发生改变,这也是定焦镜头可以调焦的原理)。为什么改变物体距相机的距离后,我们要重新进行调焦?原因如下:即使是同一个高度点,在不同距离上,摄影焦距也是不一样的,因而需要调焦,示意图如下,A1、A2的摄影焦距显然不一样: 图14 不同成像距离,摄影距离不同,因而需要调焦有人又问了,如果发生发生下面这个场景,图像不会混叠吗?A1、A3好像成像在同一点上,首先A3是可以清晰成像的,A1显然不行。
图14 不同成像距离,摄影距离不同,因而需要调焦有人又问了,如果发生发生下面这个场景,图像不会混叠吗?A1、A3好像成像在同一点上,首先A3是可以清晰成像的,A1显然不行。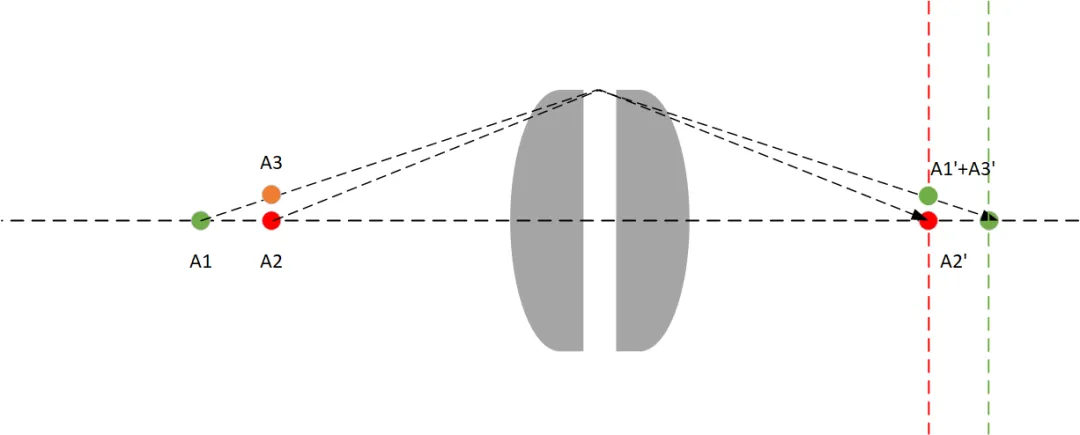 图15 不同距离、高度下光路混叠现象其次,从理论上讲,A1、A3在CCD上就是呈现为同一点,那怎么区分A1、A3点呢?拜托,动下脑子,如果有A3点,你能看到A1点吗?需要提的一点是,在之后的模型推导中,我们会将整个相机模型简化为小孔成像模型,就像下图这样,这并不会影响我们之后公式推导的准确性。
图15 不同距离、高度下光路混叠现象其次,从理论上讲,A1、A3在CCD上就是呈现为同一点,那怎么区分A1、A3点呢?拜托,动下脑子,如果有A3点,你能看到A1点吗?需要提的一点是,在之后的模型推导中,我们会将整个相机模型简化为小孔成像模型,就像下图这样,这并不会影响我们之后公式推导的准确性。 fill=%23FFFFFF%3E%3Crect x=249 y=126 width=1 height=1%3E%3C/rect%3E%3C/g%3E%3C/g%3E%3C/svg%3E) 图16 简化的相机小孔成像模型对于上面的理解,这里只要求你大致了解,知道为什么需要调焦就好,因为传统的相机光学真的是门非常复杂、高深的学问,可以讲好久,在这里我跟你讲的还是化简后的相机模型。简单说,焦距有两种,镜头的物理焦距和摄影焦距,物理焦距一般出厂后就固定了,我们调整的是摄影焦距,恰当的摄影焦距才能使图像清晰成像。
图17 景深:相机在一段范围内都可以认为是清晰成像的在平面前后一定距离范围内,从a到c,我们可以认为成像都是清晰的,这一深度范围称为景深。焦点附近,也就是在景深范围内清晰,而前后方景物都比较模糊,实际的图像如下:图18 景深范围内清晰,范围外模糊
图19 镜头光圈大小光圈的大小除了影响进光量外,也会影响景深,简单说:光圈越大,景深越小。图20 光圈影响景深原理图较大的光圈意味着更大的进光量,有利于弱光环境下拍摄,一般来说,镜头越亮约好,但是大光圈镜头也意味着景深不够。
图21 镜头常见标识还有一些镜头标识,当你看到了不认识,请百度一下!因为有时候我也会不认识上面的标志。
图22 视场角和视场范围关系光学放大倍数(Magnification, B):芯片尺寸除以视野范围;图23 光学放大倍数下面我们来讲一些主要参数的选取:1.相机CCD or CMOSCCD 提供更好的图像质量、抗噪能力,CMOS体积更小,但噪声会更多一点。当然,这不是绝对的,还是钱决定的。CCD尺寸有钱的话,尽量买大一点的。合适的分辨率对于视野范围为 ,要求测量精度为 ,那么横/竖放下的分辨率至少为 像素,通过我们不会用一个像素对应一个测量精度,一般选择倍数为4、甚至更高,这样相机单方向的分辨率为 ,相机的分辨率:。这也是为什么结构光系统视野范围大则测量精度低的原因。足够的相机帧率当被测物体有运动要求,相机的帧率不能太低,对于一些高速运动的物体,可以选择2.镜头镜头接口:跟相机接口匹配,也可以外加转换口后匹配,并且镜头可支持的最大CCD尺寸应大于选配相机CCD尺寸大小。镜头焦距根据相机CCD尺寸、工作距离、视场大小(物体的高/宽)计算所需镜头的焦距,如下:图24 根据CCD尺寸、工作距离、视场大小计算所需的镜头焦距镜头光圈范围光圈大小决定图像亮度,在拍摄高速运动物体、曝光时间很短的应用中,应选用大光圈镜头以提高图像亮度。
图16 简化的相机小孔成像模型对于上面的理解,这里只要求你大致了解,知道为什么需要调焦就好,因为传统的相机光学真的是门非常复杂、高深的学问,可以讲好久,在这里我跟你讲的还是化简后的相机模型。简单说,焦距有两种,镜头的物理焦距和摄影焦距,物理焦距一般出厂后就固定了,我们调整的是摄影焦距,恰当的摄影焦距才能使图像清晰成像。
图17 景深:相机在一段范围内都可以认为是清晰成像的在平面前后一定距离范围内,从a到c,我们可以认为成像都是清晰的,这一深度范围称为景深。焦点附近,也就是在景深范围内清晰,而前后方景物都比较模糊,实际的图像如下:图18 景深范围内清晰,范围外模糊
图19 镜头光圈大小光圈的大小除了影响进光量外,也会影响景深,简单说:光圈越大,景深越小。图20 光圈影响景深原理图较大的光圈意味着更大的进光量,有利于弱光环境下拍摄,一般来说,镜头越亮约好,但是大光圈镜头也意味着景深不够。
图21 镜头常见标识还有一些镜头标识,当你看到了不认识,请百度一下!因为有时候我也会不认识上面的标志。
图22 视场角和视场范围关系光学放大倍数(Magnification, B):芯片尺寸除以视野范围;图23 光学放大倍数下面我们来讲一些主要参数的选取:1.相机CCD or CMOSCCD 提供更好的图像质量、抗噪能力,CMOS体积更小,但噪声会更多一点。当然,这不是绝对的,还是钱决定的。CCD尺寸有钱的话,尽量买大一点的。合适的分辨率对于视野范围为 ,要求测量精度为 ,那么横/竖放下的分辨率至少为 像素,通过我们不会用一个像素对应一个测量精度,一般选择倍数为4、甚至更高,这样相机单方向的分辨率为 ,相机的分辨率:。这也是为什么结构光系统视野范围大则测量精度低的原因。足够的相机帧率当被测物体有运动要求,相机的帧率不能太低,对于一些高速运动的物体,可以选择2.镜头镜头接口:跟相机接口匹配,也可以外加转换口后匹配,并且镜头可支持的最大CCD尺寸应大于选配相机CCD尺寸大小。镜头焦距根据相机CCD尺寸、工作距离、视场大小(物体的高/宽)计算所需镜头的焦距,如下:图24 根据CCD尺寸、工作距离、视场大小计算所需的镜头焦距镜头光圈范围光圈大小决定图像亮度,在拍摄高速运动物体、曝光时间很短的应用中,应选用大光圈镜头以提高图像亮度。目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶方向,细分群包括:[工业方向]三维点云、结构光、机械臂、缺陷检测、三维测量、TOF、相机标定、综合群;[SLAM方向]多传感器融合、ORB-SLAM、激光SLAM、机器人导航、RTK|GPS|UWB等传感器交流群、SLAM综合讨论群;[自动驾驶方向]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器讨论群、多传感器标定、自动驾驶综合群等。[三维重建方向]NeRF、colmap、OpenMVS等。除了这些,还有求职、硬件选型、视觉产品落地等交流群。大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。
添加小助理微信:cv3d007, 拉你入群第二步 加入知识星球,问题及时得到解答3.1 「3D视觉从入门到精通」技术星球针对3D视觉领域的视频课程(三维重建、三维点云、结构光、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业、项目对接为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:「3D视觉从入门到精通」
学习3D视觉核心技术,扫描查看,3天内无条件退款高质量教程资料、答疑解惑、助你高效解决问题3.2 3D视觉岗求职星球本星球:3D视觉岗求职星球 依托于公众号「3D视觉工坊」和「计算机视觉工坊」、「3DCV」,旨在发布3D视觉项目、3D视觉产品、3D视觉算法招聘信息,具体内容主要包括:
收集汇总并发布3D视觉领域优秀企业的最新招聘信息。
发布项目需求,包括2D、3D视觉、深度学习、VSLAM,自动驾驶、三维重建、结构光、机械臂位姿估计与抓取、光场重建、无人机、AR/VR等。
分享3D视觉算法岗的秋招、春招准备攻略,心得体会,内推机会、实习机会等,涉及计算机视觉、SLAM、深度学习、自动驾驶、大数据等方向。
星球内含有多家企业HR及猎头提供就业机会。群主和嘉宾既有21届/22届/23届参与招聘拿到算法offer(含有海康威视、阿里、美团、华为等大厂offer)。
发布3D视觉行业新科技产品,触及行业新动向。
扫码加入,3D视觉岗求职星球,简历投起来第三步 系统学习3D视觉,对模块知识体系,深刻理解并运行如果大家对3D视觉某一个细分方向想系统学习[从理论、代码到实战],推荐3D视觉精品课程学习网址:www.3dcver.com
科研论文写作:
基础课程:
[1]面向三维视觉算法的C++重要模块精讲:从零基础入门到进阶
[2]面向三维视觉的Linux嵌入式系统教程[理论+代码+实战]
工业3D视觉方向课程:
[1](第二期)从零搭建一套结构光3D重建系统[理论+源码+实践]
SLAM方向课程:
[1]深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战
[1]彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战
[2](第二期)彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化
[3]彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析
[4]彻底剖析室内、室外激光SLAM关键算法和实战(cartographer+LOAM+LIO-SAM)
视觉三维重建:
自动驾驶方向课程:
[1] 深度剖析面向自动驾驶领域的车载传感器空间同步(标定)
[2] 国内首个面向自动驾驶目标检测领域的Transformer原理与实战课程
[4]面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
[5]如何将深度学习模型部署到实际工程中?(分类+检测+分割)
[1]零基础入门四旋翼建模与控制(MATLAB仿真)[理论+实战]
下一篇:手机中的计算摄影:多摄融合








